| 5.3. Hrana | ||
|---|---|---|
 |
5. Filtry detekce hran |  |
| 5.3. Hrana | ||
|---|---|---|
| |
5. Filtry detekce hran | |
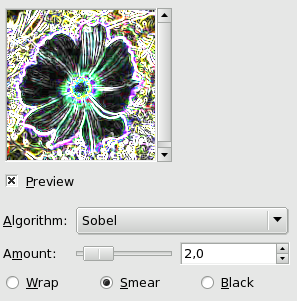
Detektor hran může využívat řadu různých detekčních algoritmů:
Sobel: Tato verze Sobelovy metody nemá tolik nastavení jako samostatný modul Sobelova metoda a proto není tak zajímavá.
Prewitt: Výsledky se podobají Sobelově metodě.
Přechod: Hrany jsou tenčí, méně kontrastní a rozostřenější, než v případě Sobelovy metody.
Roberts: Výsledky se podobají Sobělově metodě.
Diferenciální: Méně jasné hrany.
Laplace: Méně zajímavé, než samostatný modul Laplaceova metoda.
Míra: Nízká hodnota znamená černý, vysoce kontrastní výsledek s tenkými hranami. Vysoká hodnota znamená silnější hrany, méně kontrastu a mnoho barev ve tmavých oblastech.
Ohýbání, Šmouha, Černá: režim chování na okrajích obrázku. Užitečné pro práci s dlaždicovatelnými obrázky.

