

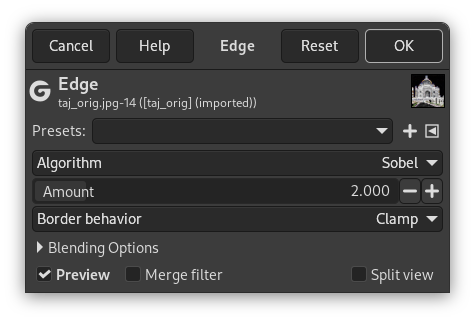
Bu süzgeç, Algoritma seçeneğinden seçilen yöntemi kullanarak görüntüdeki kenarları algılar.
- Önayarlar, “Girdi Türü”, Kırpma, Harmanlama Seçenekleri, Ön izleme, Süzgeci birleştir, Bölünmüş görünüm
-
![[Not]](images/note.png)
Not Bu seçenekler şurada açıklanmıştır: Kısım 2, “Ortak Özellikler”.
- Algoritma
-
Burada seçilen algoritma, kenar tanıma için hangi yöntemin kullanılacağını belirler. Aşağıdaki yöntemler kullanılabilir:
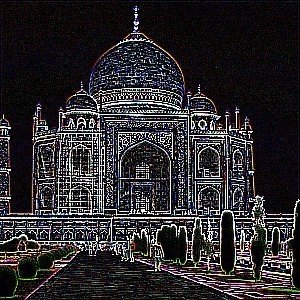
- Sobel
-
Bu, ayrı Sobel süzgecinin bir başka sürümüdür. Bu süzgecin diğer süzgeçlerden farklı olarak, ayarlanabilen ek ayarları yoktur. Bu, öntanımlıdır; sayfanın üst kısmında bir örnek gösterilmektedir.
- Prewitt pusulası
-
Prewitt operatörü, görece hızlı bir algoritmadır, ancak görüntüdeki yüksek frekanslı varyasyonlar için görece kaba olabilir.

Algoritma “Prewitt pusulası” olarak ayarlandı
- Renk geçişi
-
“Renk geçişi” algoritması kullanılırken kenarlar Sobelʼe göre daha incedir, daha az karşıtlık içerir ve daha bulanıktır.

Algoritma “Renk geçişi” olarak ayarlandı
- Roberts
-
Roberts algoritması, çapraz yöndeki yoğunluk değişikliklerini vurgular. Ancak, gürültüye karşı duyarlılığı nedeniyle büyük ölçüde sorun yaşar.

Algoritma “Roberts” olarak ayarlandı
- Diferansiyel
-
Bu algoritma genellikle kenarları daha az parlak yapar.

Algoritma “Diferansiyel” olarak ayarlandı
- Laplace
-
Bu, Laplace süzgecinin farklı bir uygulamasıdır ve farklı sonuçlar verir.
Algoritma “Laplace” olarak ayarlandı
- Miktar
-
Düşük değer, ince kenarlı siyah, yüksek karşıtlıklı görüntü ile sonuçlanır. Yüksek değer, düşük karşıtlıklı kalın kenarlar ve karanlık alanlarda birçok renk ile sonuçlanır.
- Kenar davranışı
-
Bu, kenar tanıyıcının görüntü sınırları üzerinde çalışırken hesaplamaları için bitişik pikselleri nereden alacağını belirler. Bu ayar yalnızca sonucun sınırlarını (varsa) etkiler. Kelepçe öntanımlıdır ve genel olarak en iyi seçimdir.



