Команда вызывает окно диалога «Редактора выделения». Это окно показывает активное выделение текущего изображения и предоставляет доступ к командам выделения. Окно не предназначено для работы с выделением напрямую, но при работе с выделением удобно иметь все команды вместе, нажимая на кнопки вместо поиска команд в меню. «Редактор выделения» также предлагает дополнительные параметры для команды «Выделить в контур».

- Кнопки
-
В окне «Редактора выделения» находятся несколько кнопок для быстрого доступа к командам выделения:
-
 Кнопка Выделить всё.
Кнопка Выделить всё. -
 Кнопка Снять выделение.
Кнопка Снять выделение. -
 Кнопка Инвертировать выделение.
Кнопка Инвертировать выделение. -
 Кнопка Сохранить в канал.
Кнопка Сохранить в канал. -
 Кнопка В контур. Если при нажатии этой кнопки удерживать клавишу Shift, отобразится диалог расширенных параметров. Подробнее об этих параметрах см. в следующем разделе.
Кнопка В контур. Если при нажатии этой кнопки удерживать клавишу Shift, отобразится диалог расширенных параметров. Подробнее об этих параметрах см. в следующем разделе. -
 Кнопка Обвести выделение.
Кнопка Обвести выделение.
-
- Окно просмотра
-
В окне просмотра выделенные области изображения показаны белым, невыделенные области — чёрным, а частично выделенные области — в оттенках серого. Нажатие на этом окне работает как Выделить по цвету. Смотрите пример ниже.
Рисунок 16.20. Пример нажатия на окно просмотра «Редактора выделения»
Окно редактора выделения после нажатия.

Изображение с конечным выделением.
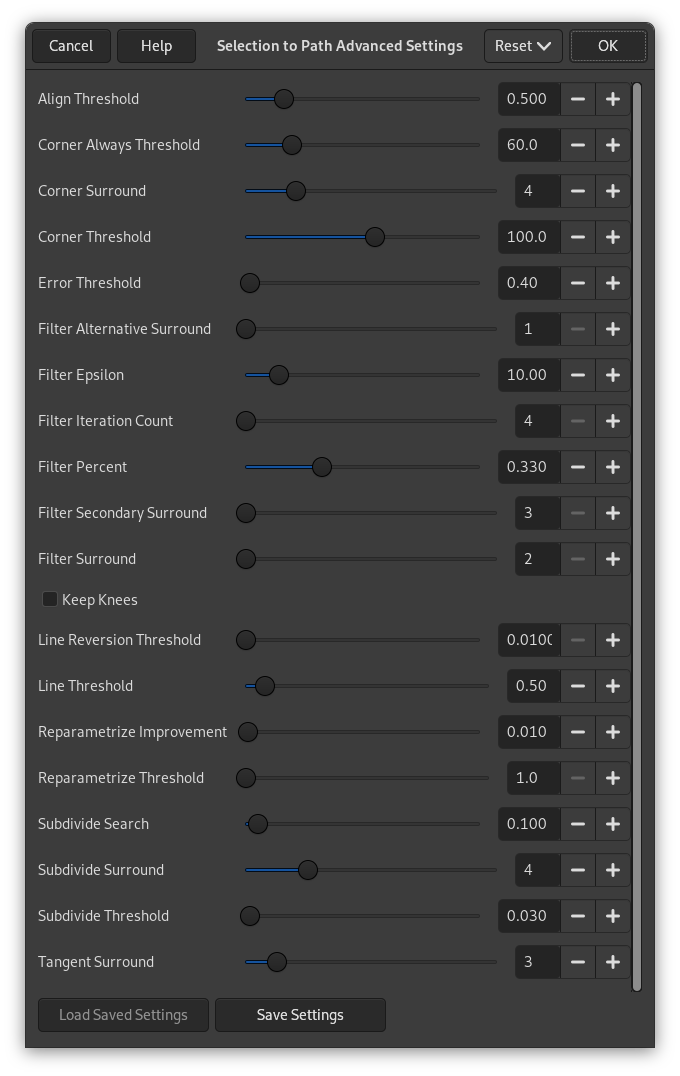
Диалог «Расширенные параметры выделения в контур», который вызывается нажатием кнопки при одновременном удерживании клавиши Shift, содержит ряд параметров, большинство из которых можно установить с помощью ползунка или поля ввода. Эти параметры в основном используются профессиональными пользователями. Вот их список:
- Align Threshold
-
If two endpoints are closer than this value, they are made to be equal.
- Corner Always Threshold
-
If the angle defined by a point and its predecessors and successors is smaller than this, it is a corner, even if it is within Corner Surround pixels of a point with a smaller angle.
- Corner Surround
-
Number of points to consider when determining if a point is a corner or not.
- Corner Threshold
-
If a point, its predecessors, and its successors define an angle smaller than this, it is a corner.
- Error Threshold
-
Amount of error at which a fitted spline[6] is unacceptable. If any pixel is further away than this from the fitted curve, the algorithm tries again.
- Filter Alternative Surround
-
A second number of adjacent points to consider when filtering.
- Filter Epsilon
-
If the angles between the vectors produced by Filter Surround and Filter Alternative Surround points differ by more than this, use the one from Filter Alternative Surround.
- Filter Iteration Count
-
The number of times to smooth the original data points. Increasing this number dramatically, to 50 or so, can produce vastly better results. But if any points that «should» be corners aren't found, the curve goes wild around that point.
- Filter Percent
-
To produce the new point, use the old point plus this times the neighbors.
- Filter Secondary Surround
-
Number of adjacent points to consider if Filter Surround points defines a straight line.
- Filter Surround
-
Number of adjacent points to consider when filtering.
- Keep Knees
-
This check box says whether or not to remove «knee» points after finding the outline.
- Line Reversion Threshold
-
If a spline is closer to a straight line than this value, it remains a straight line, even if it would otherwise be changed back to a curve. This is weighted by the square of the curve length, to make shorter curves more likely to be reverted.
- Line Threshold
-
How many pixels (on the average) a spline can diverge from the line determined by its endpoints before it is changed to a straight line.
- Reparametrize Improvement
-
If reparameterization doesn't improve the fit by this much percent, the algorithm stops doing it.
- Reparametrize Threshold
-
Amount of error at which it is pointless to reparameterize. This happens, for example, when the algorithm is trying to fit the outline of the outside of an «O» with a single spline. The initial fit is not good enough for the Newton-Raphson iteration to improve it. It may be that it would be better to detect the cases where the algorithm didn't find any corners.
- Subdivide Search
-
Percentage of the curve away from the worst point to look for a better place to subdivide.
- Subdivide Surround
-
Number of points to consider when deciding whether a given point is a better place to subdivide.
- Subdivide Threshold
-
How many pixels a point can diverge from a straight line and still be considered a better place to subdivide.
- Tangent Surround
-
Number of points to look at on either side of a point when computing the approximation to the tangent at that point.




